BTI3603 Control Systems Engineering Assignment 2026 | UMPSA Malaysia
| University | Universiti Malaysia Pahang Al-Sultan Abdullah (UMPSA) |
| Subject | BTI3603 Control Systems Engineering |
BTI3603 Assignment [60 Marks]
Instruction
- Answer all questions. The questions are arranged by chapters.
- Type or scan your report and submit to instructor’s email
- You will be using MATLAB to solve the assignment. Please attach the MATLAB script to your answer uploads
- Submission before 7 March 2026
- Any questions can be mailed to: mahizami@umpsa.edu.my
Introduction
In this assignment, we will be studying the angular position control of a DC motor. A common actuator in control systems is the DC motor. It directly provides rotary motion and, coupled with wheels or drums and cables, can provide translational motion. The electric equivalent circuit of the armature and the free-body diagram of the rotor are shown in Figure 1 below.
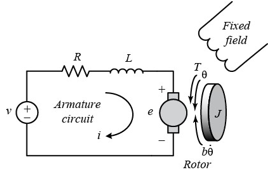
Figure 1. DC motor system.
In this example, we assume that the input of the system is the voltage source (V) applied to the motor’s armature, while the output is the position of the shaft (theta). The rotor and shaft are assumed to be rigid. We further assume a viscous friction model, that is, the friction torque is proportional to shaft angular velocity.
For this example, we will assume the following values for the physical parameters. These values were derived by experiment from an actual motor.
(J) moment of inertia of the rotor 3.2284E-6 kg.m^2
(b) motor viscous friction constant 3.5077E-6 N.m.s
(Kb) electromotive force constant 0.0274 V/rad/sec
(Kt) motor torque constant 0.0274 N.m/Amp
(R) electric resistance 4 Ohm
(L) electric inductance 2.75E-6H
The transfer function of the system can be written as:
Questions Chapter 1: System Modelling
a. Create the parameters mentioned above in Matlab.
b. Define the transfer function in Matlab. Write the final transfer function with the parameter’s numerical values.
c. Evaluate the characteristics of the system in an open loop. To do so, plot the step response of the system. Describe the step response and find the following.
-
- The steady state angular position.
- The rise time.
- The overshoot.
Chapter 2: System response and stability
a. The system needs to have a feedback loop to be properly controlled. Create a closed-loop transfer function for the system with unity feedback and no controller. Write the closed-loop transfer function.
(Hint: To properly observe the response, set the time sampling at 0.01 seconds
→ t = 0:0.01:1;)
b. Plot the step response of the closed-loop system and find the following.
-
- The steady state angular position.
- The rise time.
- The overshoot.
c. Now, we will check the stability of the system in closed-loop by the pole-zero map. To do so, follow the following steps:
-
- Write the closed-loop transfer function of the system
- Find the coefficients of the polynomials at the denominator of the transfer function
- Find the roots of that polynomials
- Plot the roots in an s-plane.
- To check your answer in d., use the command pzmap to automatically plot the polezero map.
- Describe the stability of the system from the pole-zero map. (Is it stable, marginally stable, or unstable? Damping?)
- Identify the damping value by the command damp.
Chapter 3: PID controller design
a. Using your method of choice (try an error or Ziegler Nichols), tune a PID controller to attain the following performance specifications when subjected to a step response:
- Steady state error = 0.
- Overshoot < 3%
- Rise time < 0.1 seconds List the values found for Kp, Ki, and Kd.
(Hint: For Ziegler Nichols, try ultimate gain Kp = 40,700)
END OF QUESTIONS
Get Help By Expert
Are you struggling with your BTI3603 Control Systems Engineering assignment, especially with MATLAB coding, transfer functions, and PID controller design? Many students find it difficult to plot responses, analyse stability, and get accurate results. If you are facing similar issues, you can choose Assignment Helper Malaysia, where experts provide step-by-step umpsa assignment help as per course requirements. You can also check our engineering assignment answers to understand the solution approach. Hire our pay someone to do my assignment for me service and get a clear, accurate, customised solution.
Recent Solved Questions
- BMFM31115: Financial management Assignment, AIMST University, Malaysia: Interpret standard financial metrics and valuations in order to effectively communicate sound and ethical financial decisions
- Occupational Safety and Health Assignment (OSHA) | Open University Malaysia
- BBUS2103: Discuss the types of company directors, When may a director be terminated and removed from his office: Company Law, Assignment, OUM, Malaysia
- Treasure Management Essay, TARC, Malaysia Due to the multiplicity and complexity of non-financial and financial risks, as well as uncertainties to a bank
- Madison Capital Group is considering allocating limited capital investment funds among three proposals: Principle Of Finance Assignment, UOW, Malaysia
- Based on the guideline of Kurikulum Standard Prasekolah Kebangsaann (KSPK): Art and craft for young children Assignment, Malaysia
- Proposal: Consumer Loyalty and Smart Retailing in Philippine Fast Food
- ECO162: Microeconomics Assignment, UiTM, Malaysia Explain briefly the type of business, the background of the company, and the type of product produced
- STA404: Statistics for Business and Social Sciences Assignment, UiTM, Malaysia A study has been made to compare the average amount of sugar content for two brands of energy drinks
- NATS 1870 Understanding Colour Assignment 1: Comparative Mixing Directions