TME303: The initial location and orientation of a robot’s hand are given by T1, and its new location: Automation and robotics Assignment, WOU, Malaysia
Question 1 [30%]
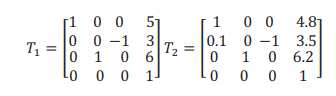
The initial location and orientation of a robot’s hand are given by T1, and its new location and orientation after a change are given by T2.
a) Construct a transformation matrix Q that will accomplish this transform (in the Universe frame).
b) Assuming the change is small, determine a differential operator that will do
the same.
c) By inspection, solve the differential translation and a differential rotation that constitute this operator.
Stuck in Completing this Assignment and feeling stressed ?
Take advantage of our private writing services and get help from professionals.
Get Help By Expert
Struggling with your TME303 Automation and Robotics Assignment? Don’t worry – our Malaysia assignment helper service is here to provide the support you need. Whether you’re grappling with complex automation concepts or need assistance completing your homework, our expert team is ready to help.
Malaysian students can trust us to deliver top-notch solutions tailored to their requirements. Say goodbye to academic stress and hello to success with our professional assistance.
Need the complete answer?
Need a custom solution for this question?
Share your module details and get fast, original academic support from our team.