DJM50113 Industrial Automation Practical Task 4 Human Machine Interface (HMI) [MELFA RV-AJ ARTICULATED]
| University | Politeknik Malaysia (PM) |
| Subject | DJM50113: Industrial Automation |
CLO 2 : Develop control structure for industrial automation system based on process specification (P4,PLO5)
1.0 Experiment outcome
At the end of the laboratory task students should be able:
i) Program and simulate a pick and place task for a RV-2AJ robotic arm with integrated conveyor system and HMI.
ii) Understand the key element of industrial robots.
2.0 Theory
The RV-2AJ robot is used to pick up a CYLINDER from a conveyor system based on the colour of the primitive. The placement will be on a coloured BOX platform based on the primitive colour. A colour sensor will be used the detect the colour of the primitive and stop the conveyor at the appropriate position. The led’s will switch on when the cylinders are picked up and until they are placed on the designated coloured boxes. The yellow led will be on when the conveyor system moves.
3.0 Equipment / Apparatus / Software:
i) Software simulation
4.0 Procedures/ Problem
i) Using a RV-2AJ robot arm, pick and place the miscellaneous primitives from. There should be no collision with any elements during the simulation.
ii) The location of the robot, conveyor, sensor and the platform are according to the programmer’s discretion.
iii) Sequence of pick and place, RED, GREEN and BLUE IV. Use delay function before and after gripper open or closes.
iv) The LED light will switch on based on colour of the cylinder that is picked up and when the placement in done on the designated coloured boxes the led will switch off.
v) The yellow LED will be on as long as the conveyor system works VII. Parameters of this task is open.
** use of multiple sensors to detect the cylinders on the boxes is advised
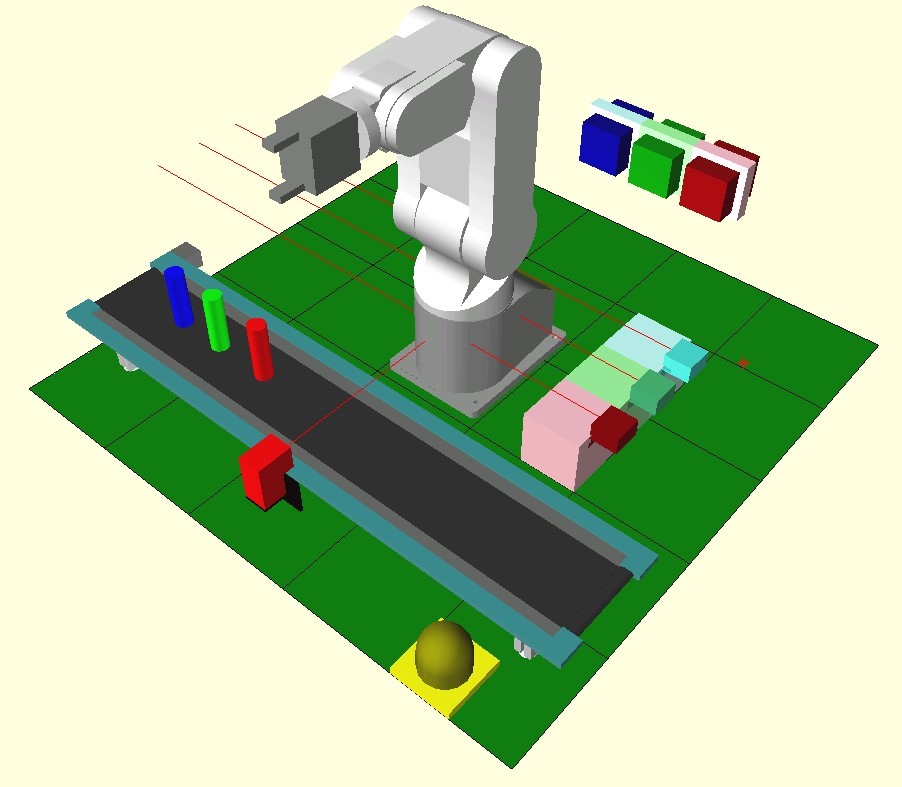 Figure 1: General layout
Figure 1: General layout
5.0 Draw/List
5.1 Work cell
5.2 Position List
5.3 Program sequence (Melfa Basic-IV )
6.0 RESULTS/DATA:
6.1 Upload the program file to the site provided.
6.2 Record your results and observations in the report submission format provided.
7.0 References
- “INSTRUCTION MANUAL, Detailed explanations of functions and operations”, Mitsubishi Electric Corporation, Japan, 2001
- “INSTRUCTION MANUAL, Troubleshooting”, Mitsubishi Electric Corporation, Japan, 2001
Get Help By Expert
Struggling with DJM50113 Industrial Automation Practical Task on Human Machine Interface (HMI)? Our Malaysia-based experts IT assignment helper provide AI-free, plagiarism-free DJM50113 assignment help covering programming and simulation of the RV-2AJ robotic arm, conveyor integration, colour sensors, LED indicators, and Melfa Basic-IV coding. With structured guidance and clear documentation, you’ll understand industrial robotics better and score higher grades confidently with expert Assignment Help Malaysia.
Recent Solved Questions
- BBF30403: PIE Corporation has 8.75 million shares of common stock outstanding, 215,000 shares: Corporate Finance Assignment, WOU, Malaysia
- ELC101: Introduction to Instrumentation Case Study, DTCC, Malaysia The reasoning found in the judgments of the Lord’s Justices of Appeal is fairly consistent. All three agree
- HBET1103: Introduction to General Linguistics Assignment, OUM, Malaysia Writers create rules that supposedly apply to all human communication, but these rules are often proven to be not universal
- Safety, Health and Welfare Assignment, AMU, Malaysia What are the lessons we have learned in the past from handling Covid 19 Pandemic to prepare for any anticipated new outbreak
- BUS707: Strategic Direction Assignment, LIBT, Malaysia Critically analyze the current strategic aims and objectives of your chosen scenario/organization
- SIQ3004: Mathematics of Financial Derivatives Assignment, UM, Malaysia Discuss the moneyness of your call and put warrants based on the latest date of your data. If your call and put warrants
- Information Technology Assignment, APU, Malaysia Octra Solutions is a privately owned, well-known software company located in Southern Malaysia
- Family & Community in Early Childhood Essay, OUM, Malaysia Ms. Kate is the principal of Unitarian Preschool with 14 years of experience. She is invited to attend a parent-teacher
- Research Methodology Assignment, UPM, Malaysia The manager of “Mee Segera Disukai Ramai” suspects that half of his 300 male and female workers are not very motivated
- Fundamental of Integrated Marketing Communication Case Study, UUM, Malaysia With an average annual growth rate of 11.2% over the past twelve years, tourism has been integral to the economy